Higher Dimensional Example¶
While the previous example demonstrated the basic usage of the rescomp package, one very important part still needs to be discussed: The hyperparameters of RC.
As always we import the needed packages, create an ESNWrapper object
[1]:
import numpy as np
import matplotlib.pyplot as plt
import rescomp
esn = rescomp.ESNWrapper()
and simulate the system.
[2]:
simulation_time_steps = 100000
lor_dim = 40
lor_dt = 0.05
lor_force = 5
starting_point = lor_force * np.ones(lor_dim) + 1e-5 * np.random.rand(lor_dim)
sim_data = rescomp.simulate_trajectory(
sys_flag='lorenz_96', dt=lor_dt, time_steps=simulation_time_steps,
starting_point=starting_point, force=lor_force)
As before, we want to train the system with data sampled from the chaotic attractor we want to predict. As a result, we have to throw the first 10000 simulated data points away, as they are not on said attractor, but instead correspond to transient system dynamics of the L96 system.
[3]:
signal = sim_data[10000:]
An additional artifact of simulated systems like this, is that they are of course perfectly noiseless. For higher dimensional systems, this can result in RC “overfitting” the data, resulting in mostly accurate short term predictions at the cost of many diverging completely after some time.
Somewhat counterintuitively, adding a small amount of artificial noise to the training data can not only ensure the long term stability of the prediction, but also decrease the short term prediction error.
Note that this procedure depends on the system in question, and is of course not an issue when training with any real world data.
[4]:
noise = np.random.normal(scale=0.01, size=signal.shape)
signal = signal + noise
Now we again want to create the reservoir/network, but this time the default parameters are not sufficient for RC to learn the system dynamics. For the L96 system the following parameters work:
[5]:
n_dim = 5000 # network dimension
n_rad = 0.5 # spectral radius
n_avg_deg = 3 # average network degree
These hyperparameters (and the ones below) have been found by trial and error for this system.
So far no reliable heuristics exist for what the correct hyperparameter ranges for an arbitrary system might be. See the FAQ for more details.
The numpy random seed, set to generate the same network everytime, is an important hyperparameter too as different random networks can vary hugely in their prediction performance even if all other hyperparameters are the same.
[6]:
np.random.seed(0)
Finally, create the network with those parameters.
[7]:
esn.create_network(n_dim=n_dim, n_rad=n_rad, n_avg_deg=n_avg_deg)
The train()/train_and_predict() methods too, have a set of hyperparameters one needs to optimize. The most important of which are the regularization parameter which is typically somewhere between 1e-4 and 1e-8
[8]:
reg_param = 1e-6
and the scale of the random elements in the input matrix w_in which is usually set to between 0.1 and 1.0
[9]:
w_in_scale = 0.5
[10]:
w_out_fit_flag = "linear_and_square_r"
Define the number of training/prediction time steps
[11]:
train_sync_steps = 1000
train_steps = 80000
pred_steps = 500
and train+predict the system using the above hyperparameters.
[12]:
y_pred, y_test = esn.train_and_predict(
signal,
train_sync_steps=train_sync_steps,
train_steps=train_steps,
pred_steps=pred_steps,
reg_param=reg_param,
w_in_scale=w_in_scale,
w_out_fit_flag=w_out_fit_flag
)
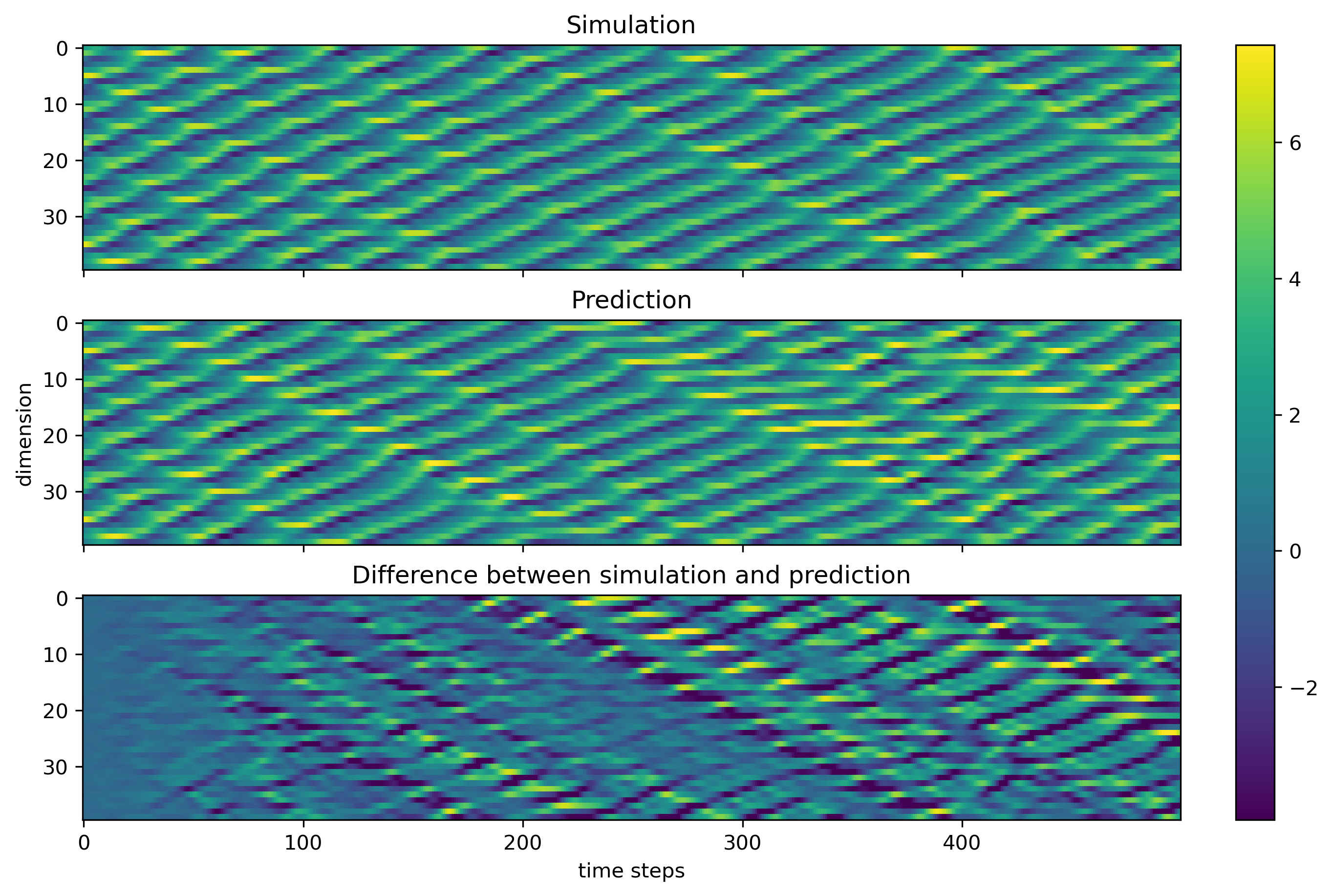
Plot the results
[13]:
fig, axs = plt.subplots(3, 1, sharex="all", figsize=(9, 6),
constrained_layout=True, dpi=300)
vmin = np.min(y_test)
vmax = np.max(y_test)
im = axs[0].imshow(y_test.T, aspect='auto', vmin=vmin, vmax=vmax)
axs[0].set_title("Simulation")
axs[1].imshow(y_pred.T, aspect='auto', vmin=vmin, vmax=vmax)
axs[1].set_title("Prediction")
axs[2].imshow(y_pred.T - y_test.T, aspect='auto', vmin=vmin, vmax=vmax)
axs[2].set_title("Difference between simulation and prediction")
axs[1].set_ylabel("dimension")
axs[2].set_xlabel("time steps")
fig.colorbar(im, ax=axs)
plt.show()